Copy of Digital Twin Assay Infrastructure for Reproducible Human and Robotic Workflows
- Melinda Chu
- May 10
- 8 min read

Abstract
Scientific reproducibility remains a major challenge across laboratory research, decentralized diagnostics, pharmaceutical manufacturing, autonomous laboratories, and industrial quality-control systems. Existing electronic laboratory notebooks (ELNs), laboratory information management systems (LIMS), and automation frameworks primarily record endpoint results or commanded actions, but frequently fail to capture the full contextual and executable state of experimental workflows. This omission contributes to inter-operator variability, robotic calibration drift, environmental instability, and inconsistent cross-site reproducibility.
This technical report introduces a Digital Twin Assay Infrastructure framework for generating machine-readable, reproducible digital representations of assays and workflows across human-operated, robotic, hybrid, and manufacturing environments. The system captures multi-modal contextual information including environmental conditions, optical signatures, robotic execution parameters, timing, reagent metadata, operator behaviors, and process-state variables to generate a Digital Twin Manifest (DTM). Predictive AI models compare expected versus observed outcomes and compute a Reproducibility Index (RI), enabling adaptive closed-loop calibration of laboratory instruments, robotic systems, manufacturing equipment, and environmental-control systems.
The framework supports laboratory assays, autonomous robotic laboratories, pharmaceutical and biologics manufacturing, environmental monitoring, decentralized diagnostics, distributed sensing networks, humanoid robots for again in place and multi-site quality assurance. Particular emphasis is placed on workflows involving optical or image-based assay monitoring, including endpoint and mid-reaction state analysis using computer vision and sensor fusion approaches. (Public disclosure document: Nonprovisional 19/672,623)This paper is also available at:https://doi.org/10.5281/zenodo.20102515
Introduction
Scientific reproducibility has emerged as one of the most significant operational and methodological challenges in modern research and manufacturing environments. Estimates suggest that a substantial percentage of preclinical research findings cannot be independently replicated due to hidden procedural variability, inconsistent environmental conditions, undocumented operator behavior, and drift in instrumentation or robotic systems.
While laboratory automation and robotic systems have improved throughput and reduced some forms of human error, automation alone does not eliminate reproducibility problems. Robotic systems themselves require calibration, maintenance, environmental normalization, and continuous monitoring. Variability may arise from robotic path drift, thermal expansion, pipetting force differences, software-version divergence, lighting changes, sensor instability, or environmental microconditions.
Current ELN and LIMS systems primarily store: endpoint results, protocol text, operator notes, commanded robotic actions, static metadata.
However, these systems generally do not capture the full executable state of the workflow at the time of assay execution. As a result, subtle but consequential contextual variables remain unrecorded.
This report introduces a Digital Twin Assay Infrastructure designed to address this gap through:
· machine-readable Digital Twin Manifests (DTMs),
· multi-modal sensor fusion,
· AI-assisted predictive modeling,
· reproducibility scoring,
· adaptive closed-loop calibration,
· cross-site synchronization,
· human-to-robot workflow transfer.
2. Motivation and Conceptual Foundation
Reproducibility Crisis in Science
Scientific reproducibility has emerged as one of the defining operational challenges of modern research. Multiple analyses across preclinical biology, pharmaceutical development, psychology, chemistry, and translational medicine have reported that a substantial proportion of published findings cannot be independently reproduced under real-world conditions. Contributing factors include incomplete protocol capture, environmental drift, undocumented operator variability, inconsistent reagent behavior, instrumentation differences, robotic calibration decay, and insufficient contextual recording of experimental workflows.
Traditional scientific recordkeeping systems—including electronic laboratory notebooks (ELNs), laboratory information management systems (LIMS), and standard protocol repositories—primarily document procedural descriptions and endpoint results rather than the complete executable state of an experiment. As a result, critical contextual variables are frequently lost, including:
· environmental microconditions,
· timing differences,
· tacit operator decisions,
· fluid-handling dynamics,
· robotic execution variability,
· imaging conditions,
· calibration state,
· interaction-sensitive workflow behavior.
Even highly standardized robotic or automated systems remain susceptible to reproducibility drift due to thermal effects, mechanical wear, software-version divergence, calibration instability, and environmental variation. Consequently, reproducibility failures occur not only in human-performed workflows, but also in autonomous laboratories and industrial manufacturing systems.
The Digital Twin Assay Infrastructure described herein addresses this challenge by transforming experimental workflows into machine-readable, context-aware Digital Twin Manifests (DTMs) capable of encoding procedural state, environmental conditions, execution dynamics, sensor measurements, and predicted assay behavior. By continuously computing a Reproducibility Index (RI) and enabling adaptive closed-loop calibration, the infrastructure provides a framework for quantitative reproducibility monitoring across human-operated, robotic, hybrid, and distributed scientific environments.
Rather than treating reproducibility as a retrospective validation problem, the proposed system reframes reproducibility as a continuously measurable and actively maintainable property of scientific workflows.
2.1 Tacit Human Variability
Human-performed assays contain hidden operational variability that is rarely documented in traditional systems. These include:
· mixing intensity,
· pipetting angle and speed,
· reagent addition timing,
· observational judgment,
· environmental adjustments,
· lighting conditions,
· handling sequence,
· motion trajectories.
Even highly trained operators performing the “same protocol” may generate materially different assay outcomes due to tacit execution differences.
In optical assays, these differences may alter:
· aggregation dynamics,
· reaction kinetics,
· turbidity behavior,
· optical edge formation,
· colorimetric transitions,
· fluid motion signatures,
· spatial pattern formation.
The Digital Twin infrastructure seeks to encode these contextual execution states into a reproducible computational representation.
2.2 Robotic and Manufacturing Variability
While we tend to think of variability with human protocols, it is worth noting that automated systems and robotic arms also have variability need calibration to start and periodic checks for calibration.
Even in robotic-arm laboratories, self-driving labs, and fully automated biomanufacturing lines, significant variability persists. Robotic arms and liquid-handling systems exhibit pose, path, and pipetting variability caused by mechanical wear, thermal expansion/contraction, gear backlash, servo drift, payload changes, work-envelope position effects, and environmental factors (ISO 9283). Calibration drift accumulates over time, and shifts in software versions or floating-point arithmetic can alter behavior across platforms. The Digital Twin System addresses this by encoding both robotic procedural graphs and observed physical states into a machine-executable Digital Twin Manifest (DTM), computing a Reproducibility Index (RI), and issuing automated calibration commands to restore and maintain reproducibility.
Consequently, robotic execution must itself be monitored, modeled, and normalized.
The Digital Twin framework therefore applies equally to:
· human-operated workflows,
· robotic laboratories,
· pharmaceutical manufacturing lines,
· autonomous experimentation systems,
· industrial quality-control systems,
· environmental monitoring platforms.
2.3 Manufacturing and Biomanufacturing EmbodimentIn pharmaceutical and biologics manufacturing, the infrastructure enables batch-to-batch and site-to-site consistency through continuous multi-modal sensing of environmental conditions, robotic execution parameters, optical quality metrics, and production-state variables. DTMs are generated at the edge and processed in the cloud to compute RI values and issue adaptive calibration commands to production equipment, reducing variability in quality-control lines, cell/gene therapy workflows, and distributed manufacturing facilities (see FIG. 2).
3. Digital Twin Assay Infrastructure
3.1 System Overview
The infrastructure consists of five major layers:
1. Multi-modal Sensor Layer
2. Edge Processing and Data Acquisition
3. Digital Twin Manifest Generation
4. Predictive AI and Reproducibility Modeling
5. Closed-Loop Calibration and Feedback
The system continuously captures and synchronizes environmental, procedural, optical, and contextual information associated with assay execution.
FIG. 1 Closed Loop Flowchart of Capture-Encode-Predict System. Closed-loop flowchart depicting the capture-encode-predict-compute RI- adjust sequence.

3.2 Multi-Modal Sensing
Sensor inputs may include: optical imaging, RGB analysis, thermal sensing, humidity sensing, pH, conductivity, turbidity, robotic telemetry, RFID reagent tracking, environmental monitoring, spectrometric sensing, motion tracking, process-state variables. The system is intentionally metric-agnostic and can integrate additional sensing modalities over time.
3.3 Optical and Image-Based Assays
One foundational embodiment involves image-based monitoring of assays using: endpoint photographs, mid-reaction imaging, temporal image sequences, computer vision analysis, optical interaction metrics, reaction-state tracking.
Examples include: aggregation assays, turbidity assays, colorimetric reactions, fluid dynamics monitoring, environmental assays, decentralized diagnostics, manufacturing quality-control imaging.
Rather than relying solely on endpoint values, the system may analyze: spatial organization, edge formation, temporal transitions, kinetic behavior, reaction morphology, evolving optical patterns. This approach enables richer characterization of assay state and reproducibility.
For Optical Assays here are some possible metrics.

4. Digital Twin Manifest (DTM)
The Digital Twin Manifest represents a machine-readable encoding of:
· procedural graphs,
· execution logic,
· environmental conditions,
· sensor state,
· reagent metadata,
· robotic parameters,
· operator interactions,
· timing information,
· observed metrics,
· predicted outcomes.
The DTM serves as an executable representation of workflow state rather than merely a static record of results.
Potential implementations may utilize: JSON-LD, graph-based representations, semantic workflow schemas, distributed synchronization systems, version-controlled workflow records.
The DTM may be interpreted by:
· humans,
· robotic systems,
· autonomous laboratories,
· AI agents,
· manufacturing-control software,
· distributed cloud infrastructures.
5. Predictive Modeling and Reproducibility Index
5.1 Predictive Modeling
AI models may analyze:
· image sequences,
· environmental vectors,
· contextual metadata,
· robotic telemetry,
· historical assay trajectories.
Potential architectures include: convolutional neural networks, recurrent neural networks, transformers, probabilistic inference systems, reinforcement-learning systems, federated-learning infrastructures. These models generate predicted assay behavior and expected workflow trajectories.
5.2 Reproducibility Index (RI)
The system computes a Reproducibility Index (RI) representing agreement between predicted and observed outcomes.

Where:
· represents metric weighting,
· represents predicted values,
· represents observed values,
· represents reference ranges.
High RI values indicate strong reproducibility and workflow consistency.
The RI may be computed from:
· optical metrics,
· environmental stability,
· robotic execution fidelity,
· kinetic trajectories,
· manufacturing parameters,
· distributed cross-site comparisons.
6. Closed-Loop Calibration
When reproducibility deviation is detected, the infrastructure may issue automated calibration commands to:
· robotic pipettors,
· incubators,
· imaging systems,
· environmental controls,
· manufacturing equipment,
· lighting systems,
· robotic trajectories,
· fluid-handling systems.
This creates a continuous adaptive calibration loop:
Capture → Encode → Predict → Compute RI → Adjust
The infrastructure therefore acts not only as a monitoring system, but also as an active reproducibility-maintenance framework.
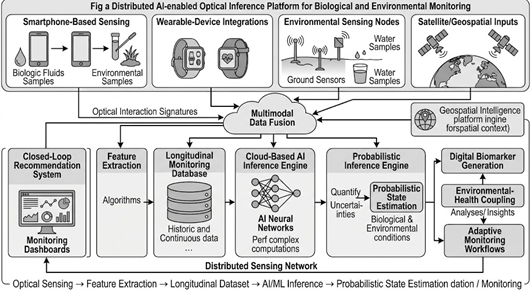
FIG. 2 — Multi-Modal Data Fusion and Metric Integration
FIG. 2 illustrates multi-modal data fusion of optical, pH, and RGB inputs into the unified DTM.

7. Cross-Laboratory and Cross-Manufacturing Synchronization
DTMs may be synchronized across:
· distributed laboratories,
· manufacturing sites,
· decentralized diagnostic networks,
· environmental sensing systems,
· autonomous robotic facilities.
This enables:
· inter-site reproducibility validation,
· human-to-robot workflow transfer,
· robotic-to-robotic standardization,
· manufacturing consistency,
· longitudinal monitoring,
· distributed benchmarking.
A workflow validated in one environment may therefore be transferred to another site while preserving contextual execution fidelity.
FIG. 3 — Cross-Lab Validation Framework
FIG. 3 shows cross-lab validation between Lab A and Lab B via a central RI database.

8. Applications
8.1 Laboratory Assays
Applications include: optical assays, aggregation assays, viability assays, potency assays, microscopy workflows, environmental assays, decentralized diagnostics.
8.2 Autonomous and Robotic Laboratories
The DTM may function as a machine-executable workflow representation for: self-driving laboratories, robotic liquid handling, AI-assisted experimentation, adaptive protocol optimization, autonomous assay execution.
8.3 Pharmaceutical and Biomanufacturing Systems
The framework may support: batch normalization, process-state monitoring, adaptive quality assurance, robotic calibration, distributed manufacturing synchronization, site-to-site validation, biologics production workflows.
8.4 Environmental and Distributed Monitoring
Applications may also include: environmental sensing networks, distributed water monitoring, field-deployable diagnostics, decentralized assay systems, longitudinal environmental intelligence infrastructures.
8.5 Humanoid Robotic Companions and Aging-in-Place ApplicationsThe Digital Twin Assay Infrastructure extends naturally to humanoid robotic platforms used as aging companions and assistive caregivers. Daily living activities performed by humanoid robots — such as precise medication dispensing and preparation, simple point-of-care diagnostic assays (e.g., glucose or biomarker tests), meal preparation protocols, physical therapy exercise sequences, and environmental/home safety monitoring — can be modeled as reproducible “assays” in the broadest sense defined herein.
Tacit variability in robotic execution (joint trajectories, grip force, timing of hand-offs, environmental micro-adjustments) is captured via the same multi-modal sensor suite (cameras, force/torque sensors, environmental monitors) and encoded into DTMs. The Reproducibility Index provides real-time feedback to maintain consistent, safe performance across different humanoid platforms, software updates, or home environments. This enables reliable human-to-robot workflow transfer: a care protocol validated by a human caregiver or clinician can be migrated to a humanoid robot with quantifiable RI assurance.
Such capabilities are particularly valuable for elderly care, where reproducibility directly impacts medication adherence, nutritional consistency, fall prevention, and chronic-condition monitoring — ultimately improving quality of life and reducing caregiver burden.
FIG. 4 — Generalized Digital Twin Platform Architecture. System-wide reproducibility infrastructure spanning laboratory, robotic, manufacturing, environmental, and clinical workflows.

9. Future Directions
Future implementations may incorporate: fully autonomous optimization systems, federated reproducibility infrastructures, distributed scientific workflow exchanges, AI scientist agents,
adaptive manufacturing systems, real-time regulatory audit layers, digital biomarker integration, VR/AR workflow training environments, global reproducibility databases.
Over time, Digital Twin Assay Infrastructure may enable machine-readable scientific workflows capable of being reproduced consistently across institutions, robotic platforms, manufacturing facilities, and decentralized environments.
10. Conclusion
This report presents a generalized Digital Twin Assay Infrastructure for reproducible experimental and manufacturing workflows spanning human-operated laboratories, robotic systems, autonomous experimentation platforms, decentralized diagnostics, and industrial manufacturing environments.
By capturing the full executable state of workflows rather than merely endpoint results, the framework enables:
· reproducibility-aware experimentation,
· adaptive calibration,
· cross-site synchronization,
· human-to-robot transfer,
· machine-readable workflow execution,
· longitudinal reproducibility monitoring.
The combination of Digital Twin Manifests, predictive AI modeling, multi-modal sensing, and Reproducibility Index computation represents a potential foundation for next-generation scientific infrastructure and reproducible autonomous experimentation systems.
Public Disclosure Document. This document is intentionally made publicly available to establish prior art in support of related patent filings
Nonprovisional 19/672,623, “System and Method for Generating Reproducible Digital Twins of Assays,” Filed May 9, 2026 by Melinda B. Chu, M.D. M.B.A., Solo Inventor.


Comments